Функціонування оператора, який керує сільськогосподарською технікою, є складною системою взаємодій різного рівня. Оператору доводиться вирішувати одночасно ряд завдань будь-якого рівня в дуже малий термін часу. За короткий термін оператор програмує собі послідовність відповідних рішень і змін в умовах руху, виконання технологічних операцій та іншого. Його робота формується під впливом системи високорівневих цілей (цілі загального характеру відносно отримання сільськогосподарської продукції) і цілей, пов'язаних з конкретними питаннями щоденної роботи. Зміст функцій оператора і міститься між цими цілями та завдання високого та найнижчого рівнів. Загальний зміст роботи оператора може бути представлений у вигляді блоків на рис. 5.5.
1. Блок, що формує взаємодію "людини-оператора" і "машини ". В зміст блоку закладена ієрархічна модель управління машиною зі зворотнім зв'язком.
2. Блок сприйняття подій, інформації, стану й іншого. Розподіл сприйняття людини-оператора визначає два напрями:
а) відносно загального виконання робіт;
б) відносно подій, що можуть скласти виробничу небезпеку.
3. Блок пам'яті (фізіологічна характеристика оператора), який має можливість використати необхідну інформацію.
4. Блок переробки інформації, заснований на засадах вилучення і використання тієї інформації для формування уявлень "що треба робити" за конкретними операціями.
5. Блок прийняття рішень.
6. Блок поведінки оператора, заснований на сукупності елементів професійної підготовки. Складається за ієрархією цих елементів.
Кожен з наведених блоків може бути уявлений за відповідними моделями, які фактично представляють зміст одного чи декількох таких блоків. На рис. 5.5 показано, що "людина" та "машина", по-перше, взаємодіючи з цілями і завданнями найнижчого рівня, формують систему взаємовідносин щодо кожної конструктивної складової машини. На рис. 5.6 наведено зміст таких ієрархічних взаємодій з об'єктами різного характеру змісту. Насамперед це об'єкти машини, які поділяються на:
— активні — якими керує оператор;
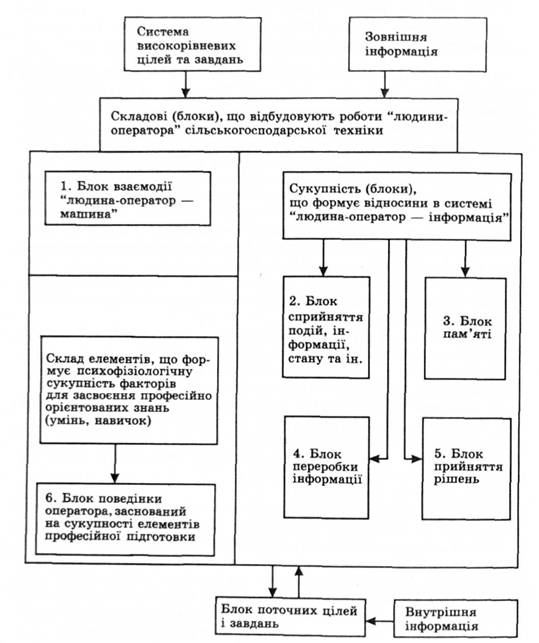
Рис. 5.6. Складові, що формують модель роботи "людини-оператора" сільськогосподарської техніки
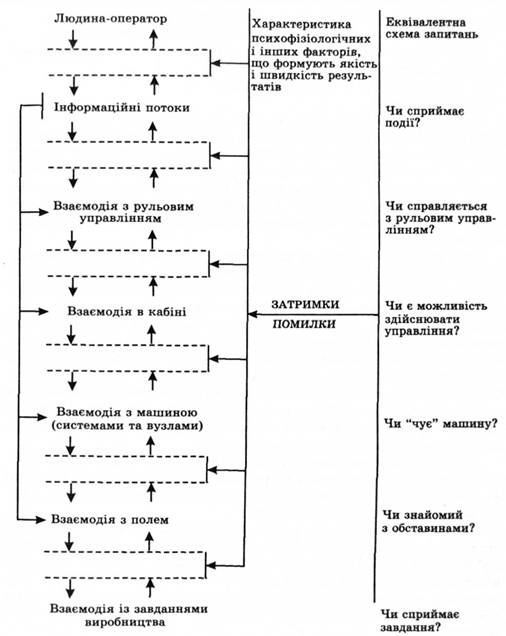
Рас 6.6. Ієрархічна структура ручного управління технікою: блок взаємодії людини-оператора з машиною (рис. 5.5)
— пасивні (відносно впливу оператора) — дверцята й інші;
— що взаємодіють з оператором і машиною — сидіння;
— що заважають чи сприяють праці оператора — прилади, які формують стан мікроклімату;
— фактори — що несуть інформацію;
— шлях (поле).
Вся система взаємозв'язків будується на оцінці можливо діючої небезпеки. Тому в кожному русі, дії, рішенні, виконанні елементів технологічних процесів наявний і діє механізм попередження, який реалізує сам оператор за алгоритмом, що наведено на рис. 5.7. У нашому варіанті — відбудова моделі оператора — він представлений в поширеній інтерпретації на рис. 2.12 (с. 62). Це дає змогу більш глибоко уявити, як реалізується діяльність оператора в режимі "самозахисту".
Блок взаємодії людини з машиною будується на основі сприйняття оператором інформаційних потоків, які мають місце при його взаємодії з машиною. Зміст цих потоків слід розглядати за розподілом відносної до початку робіт, під час роботи і при зупинках (чи закінченні роботи). Це пов'язано з тим, що огляд перед початком роботи дає можливість переконатися у відсутності небезпек, які чи зашкодять роботі, чи зовсім зроблять її неможливою. Під час роботи інформаційний потік частково змінюється за часом (в результаті переміщень в межах поля чи дороги), а частково залишається постійним відносно роботи машини. При зупинках (чи закінченні робіт) знову оператор повинен визначити стан людини і визначити можливість подальшого виконання робіт.
Подальшими складовими взаємодій є: рульове управління, кабіна, машина, поле і завдання. В процесі взаємодій з нижньою складовою частиною має місце затримка за часом, який дорівнює термінам, що залежать від самого оператора.
В процесі взаємодій між терміном отримання інформації і відповідною реакцією оператора минає певний час, пов'язаний з переробкою ним інформації і прийняттям рішення, а також час, який відображає "реакцію" машин на реалізовані управлінські дії оператора. В деяких випадках можуть бути і помилки оператора, які також збільшують тривалість взаємодії оператора й елементів машини.
Затримка у виконанні основних операцій із здійснення керування машиною є однією з найважливіших характеристик професіоналізму працівника, пов'язаних зі сприйняттям дійсності. В свою чергу це е ще одним з компонентів замкнутої системи ручного управління — зворотним зв'язком.
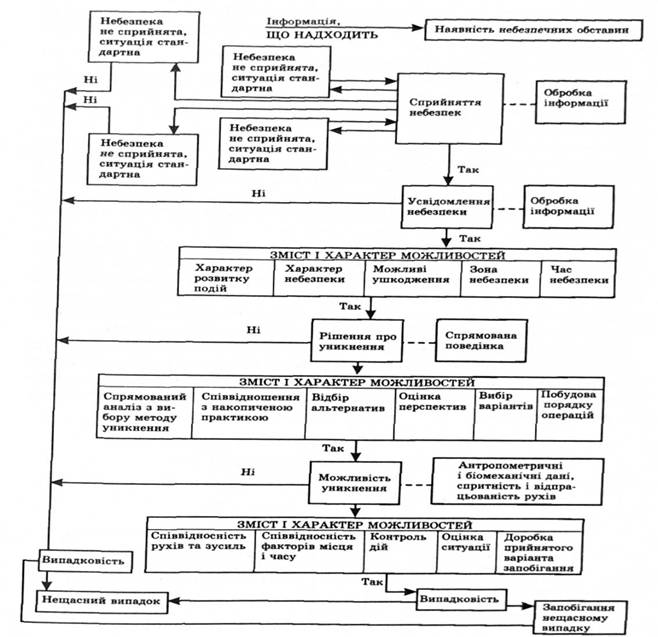
Рис. 5.7. Поширена (ступенева) модель виникнення нещасного випадку (з вини оператора)
Визначену затримку пояснює рис. 5.8.
Затримка дії оператора тією чи іншою мірою демонструє його можливості з питань засвоєння знань, умінь, навичок, психофізіологічних і антропологічних можливостей і набутих ним навиків виконання елементів операцій.
Затримки в роботі оператора можуть також статися внаслідок його помилки. Якщо помилка не веде за собою незворотних подій у вигляді аварії, нещасного випадку та ін., то можливі варіанти виправлення помилок за варіантами (рис. 5.9), де наведено повний механізм ліквідації помилок оператора у вигляді кругообігу подій з боку людини.
В реальних умовах виробництва (обробітку ґрунту, виконанні транспортних робіт й іншого) оператор використовує свої знання, уміння, навички, але приймає рішення (про зміну режимів руху, маневрування та іншого) в дуже короткий термін. Тому можна казати, що ми маємо кожний раз справу з двома моделями роботи (чи самого) оператора: статичної і динамічної (рис. 5.10 на с. 299).
Людина, оператор за професією, відрізняється від інших тим, що має професійно орієнтовані знання, уміння, навички, які можуть бути реалізовані через штучно набуті професійно орієнтовані психофізіологічні і антропологічні можливості. Зазначене і формує статичну модель оператора.

Рис. 5.8. Зміст причин затримання операторських дій в процесі ручного керування машиною
Статична модель стану оператора має рівневий характер. На кожному рівні стан характеризується двома складовими, що відображають можливості оператора виконувати окремі операції чи сукупності їх елементів у визначеній послідовності (це визначає зміст першого рівня).
На другому рівні реалізується процес поповнення новими елементами умінь, знань, навичок і одночасно цей рівень свідчить про можливість оператора збільшити арсенал своїх можливостей, вписати нове в існуюче старе — відносно до засвоєних елементів першого рівня.
Виходячи з визначення статичної моделі, можна казати, що досягнення у засвоєнні нових елементів у оператора беруть участь механізми реалізації його психофізіологічних і антропологічних можливостей. Таким чином освоєння другого рівня є результатом реалізації визначених можливостей і суть другого періоду є поєднання нових знань, умінь і навичок з механізмами їх реалізації можливостей оператора.
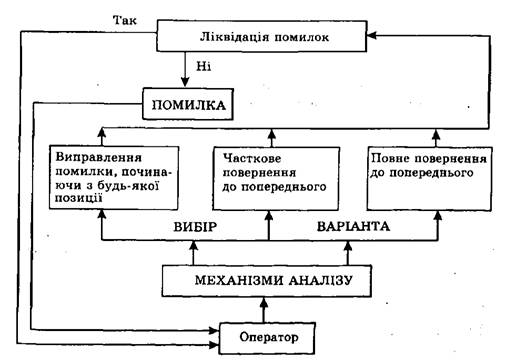
Рис. 5.9. Ліквідація помилок оператора
Другою складовою першого рівня (позиція 16 на рис. 5.10) є сукупне використання простих елементів трудових процесів, що реалізуються в практиці в будь-якій послідовності.
Другий рівень моделі відтворює процес поновлення арсеналу професійної здатності оператора за рахунок його психофізіологічних і антропологічних можливостей (відповідно позиції ІІа і ІІб рис. 5.10). Для першої складової на цьому рівні — це засвоєння нових окремих простих елементів, а на другому — вже комплексне їх використання.
Третій рівень статичної моделі встановлює смисл, що відповідає за своїм змістом найвищому рівню професійних можливостей оператора. Це відбувається тоді, коли високий рівень професіоналізму стає поведінкою оператора. Але на третьому рівні також є дві складові: перша відповідна до становища, коли поведінка оператора заснована на правилах (стандартні події) і друга, коли заснована на системних уміннях (уявлення).
Найвищим рівнем уявлення загальної моделі роботи (стану) оператора було б представлення сумісного (єдиного) комплексу статичної і динамічної моделі, але для повного уявлення необхідно використовувати спеціальні (глибокі) знання в сфері фізіології, медицини, кібернетики тощо. Тому ми обмежені тільки поняттями, які можуть бути сприйняті на рівні загальних підходів безпеки життєдіяльності. В цьому розумінні ми вводили тільки основні елементи динамічної моделі, які дають змогу зрозуміти доступні базові уявлення. До таких уявлень належать фактори, що утворюють мотивацію необхідності прийняття рішень — встановлення можливої небезпеки. До елементів належать стеження за перебігом подій у процесі керування машинами та іншою технікою, розпізнання небезпеки, відбір найбільш значущих факторів небезпеки, перетворення всього в необхідну інформацію і використання цієї інформації для прийняття рішень. Крім того, оператор, визначаючи ці елементи, накопичує в своєму досвіді відповідні нові знання, уміння, навички, які є базовими для поновлення і забезпечення уявлень статичної моделі оператора.
5.6.6. Засоби захисту в умовах виробництва
5.7. НАДАННЯ ПЕРШОЇ ДОПОМОГИ ПОТЕРПІЛИМ
5.7.1. Порушення дихання і серцевої діяльності
5.7.2. Утоплення
5.7.3. Поранення і кровотечі
5.7.4. Удари
5.7.5. Переломи і вивихи
5.7.6. Травми голови
5.7.7. Травми грудної клітки й живота