Прийняте оператором рішення необхідно правильно і своєчасно реалізувати шляхом введення інформації в машину. Для цього використовують два "виходи" людини, моторний і мовний. У багатьох СЛМ значна кількість керуючих дій оператора виконується через рухи. Мовне керування застосовують для вирішення специфічних задач, хоча цей напрямок вважається дуже перспективним.
Технічна досконалість систем управління спрощує вимоги до моторики оператора. Його дії зводяться до натискання кнопок, увімкнення тумблерів, повороту рукояток тощо, тобто до простих рухів, засвоєння яких не потребує спеціального навчання.
Уся складність управління переміщується з виконавчих актів на центральні механізми регуляції керуючих дій, перебіг яких залежить від переробки значної кількості інформації.
Точність реалізації прийнятого рішення в керуючій дії значною мірою залежить від ступеня узгодження моторного "виходу" оператора з конструкцією органів управління. Будь-яка керуюча дія складається зі значної кількості елементарних дій, поєднаних між собою в цілісну структуру завдяки центральному механізмові регуляції. Різні елементарні рухи мають і різне призначення, за яким їх можна поділити на три групи:
o гностичні рухи, спрямовані на вивчення об'єкта й умов праці. До них належать дотикові, ощупувальні, вимірювальні та ін.;
o пристосувальні рухи, до яких відносять установчі, урівно-важувальні та ін.;
o робочі або виконавчі рухи, завдяки яким здійснюється сам вплив на орган управління.
Треба зазначити, що структура рухових компонентів залежить від задачі, котру вирішує оператор, конструкції органів управління, їхнього призначення і розташування у просторі, антропометричних, біомеханічних і психофізіологічних властивостей самого оператора, а також від рівня його підготовки.
Усі рухові задачі можна поділити на чотири основні класи:
o операції ввімкнення, вимкнення, перемикання, основною характеристикою яких є час простої реакції або реакція вибору;
o задачі, які базуються на низці послідовних і повторюваних рухів. Основною характеристикою цього класу рухів є їхній темп;
o задачі, що вирішуються при маніпулюванні органами управління під час налагодження апаратури і точного встановлення режиму роботи об'єкта. Характеризуються точністю дозованих рухів, яка оцінюється за силовими, просторовими і часовими параметрами;
o задачі спостереження за змінними об'єктами, котрі належать до класу безперервних перцептивно-моторних задач.
Серед основних характеристик керуючих дій оператора виділяють часові, силові, просторові і точнісні.
Часова (швидкісна) характеристика операцій ввімкнення вимірюється тривалістю рухової реакції, яка залежить від відстані перенесення руки Я, ширини органу управління IV і визначається співвідношенням

Для повторюваних рухів основною характеристикою є частота їхнього повторення або темп. Встановлено, що максимальний темп обертальних рухів становить 4,0...4,8 об/с і залежить від розмірів самих ручок та їх опору. Так, найбільша швидкість буде при радіусі ручки 3 см і опорі 2 кг, а якщо опір становитиме 5 кг, то максимальна швидкість буде при радіусі ручки вже 4 см, максимальний темп натиску-вальних рухів при опорі 25 г для ведучої руки - 6,88 нат/с, а для неведучої - 5,3 нат/с. Зі збільшенням зусиль опору до 400 г темп зменшується і відповідно становить 6,14 і 5,59 нат/с. Максимальний темп ударних рухів змінюється від 5 до 14 ударів за секунду. В середньому він дорівнює 8,5 уд/с. Для тривалого часу роботи оптимальний темп коливається від 1,5 до 5 уд/с.
Силові характеристики рухів залежать від характеру самих рухів (витягування, штовхання, відведення тощо) і кута між плечем та вертикаллю тіла. Найбільше зусилля може бути розвинуте при штовханні від себе - 62,6 кг, витягуванні на себе - 54,4 кг, а найменше - при штовханні вниз - 18,6 кг та відведенні від себе - 15,5 кг. Максимальне зусилля, яке може розвинути ведуча рука, в середньому на 10... 15 % більше за максимум для неведучої.
Силові характеристики рухів людини мають враховуватися в конструюванні органів управління, зокрема у виборі опору цих органів (табл. 7).
Таблиця 7
Рекомендовані зусилля для різних типів органів управління
Тип органу управління | Зусилля, кг |
Рукоятка | 2-4 |
Кнопки, тумблери, перемикачі: легкого типу важкого типу | 0,14-0,16 0,6-1,2 |
Ножні педалі управління, що використовуються: рідко часто | до 30 2-5 |
Важелі ручного управління, які використовуються: періодично постійно | 12-16 2-4 |
До просторових характеристик рухів оператора належать розміри зон досяжності в моторному полі і траєкторія рухів. Моторна діяльність оператора переважно виконується за нерухомого положення тіла, тобто без переміщення тулуба, і тому розміри моторного поля визначаються розмірами рук оператора.
Виходячи з цього моторне поле оператора умовно поділене на зони максимальної, допустимої та оптимальної досяжності (рис. 18). Розміри цих зон у горизонтальній та вертикальній площині наведені в таблиці 8.
У зонах оптимальної і допустимої досяжності можливе виконання найшвидших і найточніших рухів за мінімальної втомлюваності оператора. Тому в цих зонах рекомендується розташовувати органи управління, які найбільш важливі і часто використовуються. Слід зауважити: залежно від зусиль і точності рухів, що вимагаються, у цих зонах є певні раціональні рівні. Так, наприклад, важелі, які для свого переміщення потребують значних зусиль, варто розташовувати на нижніх рівнях оптимальної зони. Вимоги до точності переміщення найкраще задовольняються на середньому рівні цієї зони. В зонах максимальної досяжності
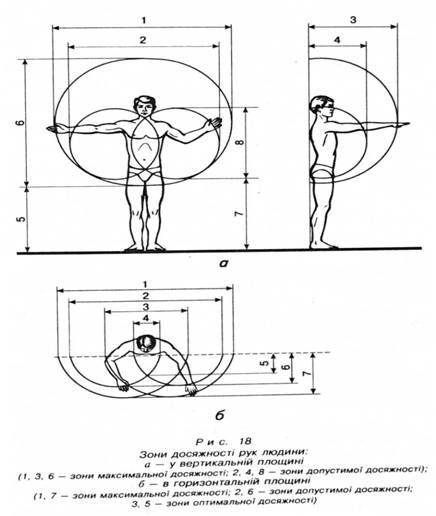
Таблиця 8 Розміри зон досяжності людини, мм
Номер позиції на рис. 18 | У вертикальній площині | У горизонтальній площині | ||
жінки | чоловіки | жінки | чоловіки | |
1 | 1400 | 1550 | 1370 | 1550 |
2 | 1100 | 1350 | 1100 | 1350 |
3 | 730 | 800 | 660 | 720 |
4 | 430 | 500 | 200 | 240 |
5 | 630 | 700 | 200 | 240 |
6 | 1260 | 1400 | 300 | 335 |
7 | 680 | 770 | 480 | 550 |
8 | 720 | 800 | - | - |
точність і швидкість керуючих рухів суттєво знижені, і втома настає швидше. В цій зоні можлива лише недовготривала робота.
Траєкторія рухів може бути різною. Експериментально доведено, шо еліптичні і кругові рухи ефективніші, ніж прямолінійні, їх застосування збільшує продуктивність праці і знижує втому оператора.
Точнісні характеристики рухів оператора оцінюються можливостями людини виконувати (без участі зорового контролю) дії певної спрямованості, тривалості, потужності. Ці характеристики варто враховувати при організації дозованих рухів.
Найбільша точність характерна для рухів, які здійснюють на відстані 15...35 см від середньої точки тіла людини. Вже на відстані 40...50 см точність аналізу суттєво знижується. Точність влучання рукою у потрібне місце на пульті управління становить ± 15 см у середній зоні нижче грудей і ± 30 см у крайніх зонах.
Амплітуда рухів найточніше оцінюється в межах 8... 12 см, коротші - переоцінюються, а довші - недооцінюються.
Тривалість рухів може оцінюватися з точністю 0,1...0,2 с. При вивченні дозованих зусиль було встановлено, що оператор із більшою точністю зберігає певне зусилля, ніж змінює його в певних межах. Спеціальні тренування підвищують точність регулювальних зусиль за рахунок зниження диференціального порога. Наприклад, при розрізненні ваги з 3...10 % до 1 % [57].
Одним із важливих питань є формування рухових навичок. На початкових етапах утворення рухових навичок відбувається під контролем зорової системи людини, який пізніше переходить до тактильного і кінестетичного аналізаторів. При цьому утворюється внутрішній контур регулювання завдяки діям цих аналізаторів, по якому сигнали проходять значно швидше (0,4 с), ніж по зовнішньому (1,2 с), котрий забезпечується роботою зорової системи. Ця властивість може бути врахована для підвищення якості управління за рахунок зворотного зв'язку безпосередньо на тактильний аналізатор, що, своєю чергою, забезпечує швидкість самоконтролю і, відповідно, підвищує ефективність праці оператора.
Мовний канал надходження інформації до машини має ряд переваг над механічним, ручним, зокрема:
o звільнює людину-оператора від залежності від стаціонарного робочого місця, надаючи їй можливість вільного переміщення під час управління об'єктом;
o у певних випадках швидший і надійніший, ніж механічний, у 2-3 рази, до того ж і налагодження зворотного зв'язку в цих випадках ефективніше [47; 57];
o не потребує забезпечення необхідного освітлювання.
Дослідження доводять, що при мовному введенні інформації оператор втомлюється значно пізніше, ніж при моторному. На ефективність застосування мовного введення інформації впливають і негативні фактори, пов'язані з дією акустичних шумів, розмов інших операторів, акустичних сигналів від механізмів, рівня тиску в довколишньому середовищі тощо.
Технічний рівень сучасних комп'ютерних систем дає змогу операторові ефективно застосовувати мовний вхід у процесі управління СЛМ.
Загальне вирішення проблеми автоматичного розпізнання слів або окремих фраз стає можливим тільки на основі детального вивчення фонетичних, граматичних, семантичних і прагматичних закономірностей людської мови та процесу її сприймання і розуміння. Сьогодні вже функціонують системи, керування якими здійснюється мовними командами, і є вже системи, що застосовують усний діалог.
4.1. Основні характеристики і види діяльності операторів
4.2. Фактори впливу на операторську діяльність
Суб'єктивні фактори
Об'єктивні фактори
4.3. Методи відображення, опису й аналізу діяльності оператора
4.4. Функціональні стани оператора
4.5. Групова діяльність операторів
Контур предметно-інформаційного регулювання
Контур емоційно-мотиваційного регулювання